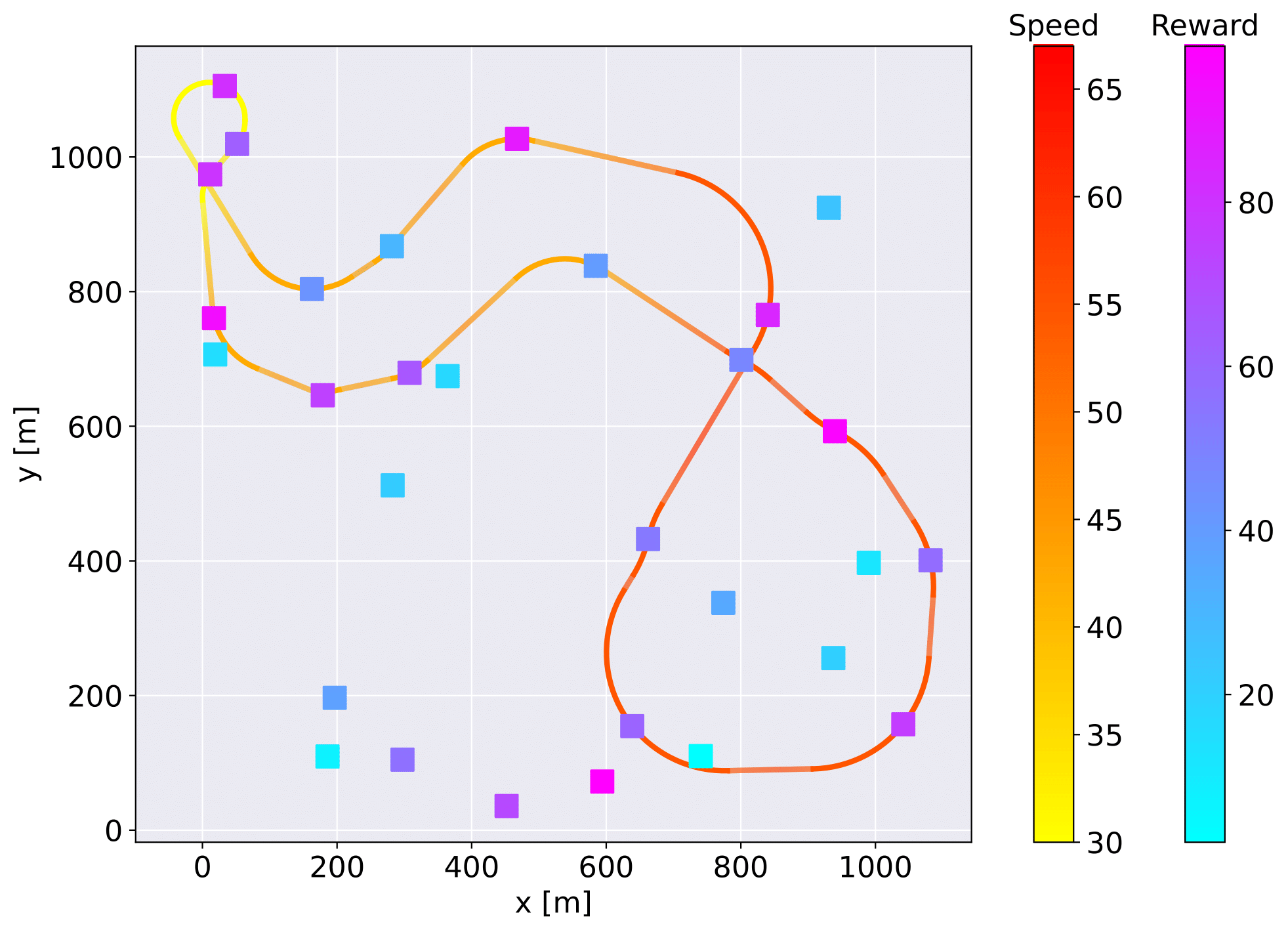
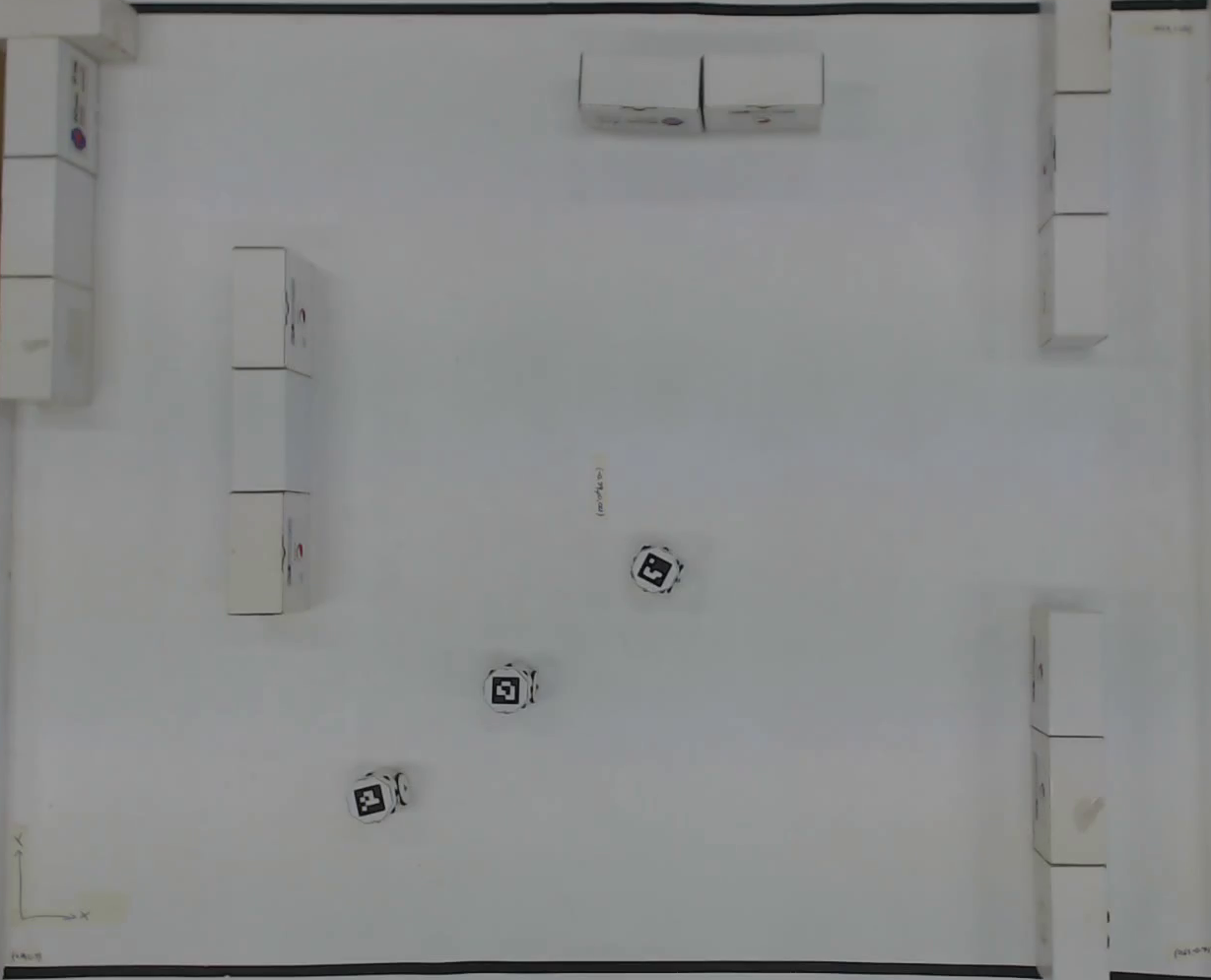
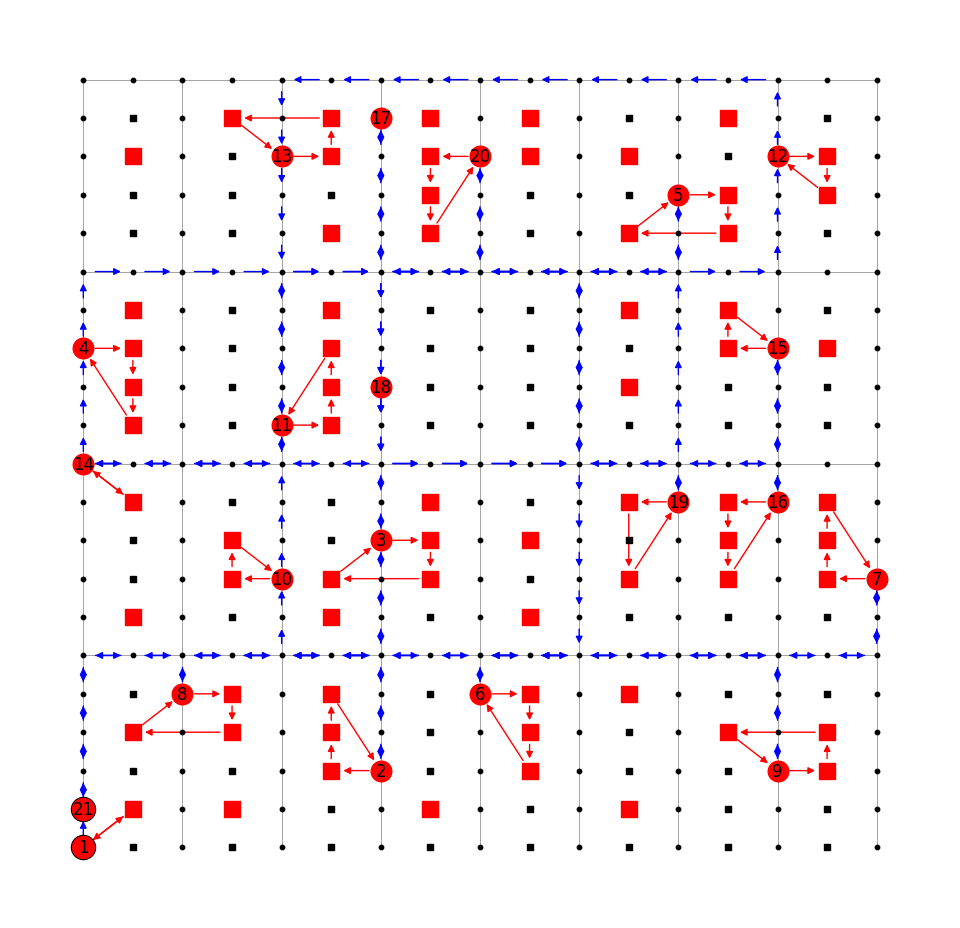
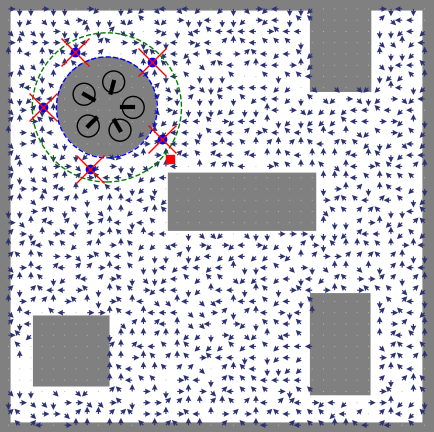
Current Social Mobile Manipulator Navigation of a Mobile Manipulator considering presence of humans. DOP Related Problems proposed related to the Dubins Orienteering Problem. Multi-robots Navigation Communication Backbone Reconfiguration with Connectivity Maintenance. Previous UGV/UAV Path-Planning Collaborative Unmanned Ground and Aerial vehicles Path Planning for Inventory Management in Warehouses. AVANT - UFMG Student-composed team that works with drones automation. RL in Social Robotics Reinforcement Learning for Approaching Groups of People in a Socially Acceptable Manner.